- 作品名称:
- 一种新型的外骨骼式主从机器人遥控操作系统
- 大类:
- 科技发明制作B类
- 小类:
- 机械与控制
- 简介:
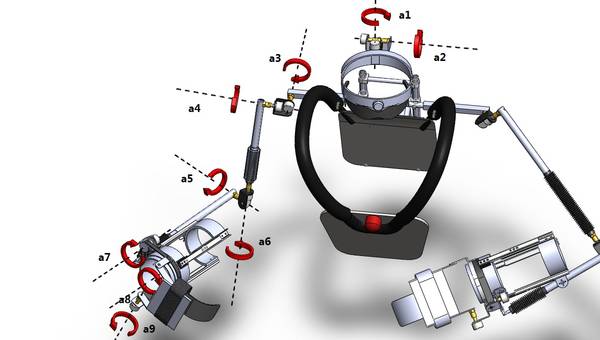
- 本发明为一套可以应用于极限环境作业的新型主从式仿人机器人控制系统,包括一个外骨骼动作捕捉衣和一个履带式仿人机器人。操作者通过穿戴外骨骼动作捕捉衣,可以实时采集人体上身各关节运动数据,并利用wifi技术无线远程遥控仿人机器人。仿人机器人主体搭建在一个履带式移动平台上,可以实现机器人与操作者之间的视频音频等多媒体交互功能。该技术旨在利用机器人替代人类工作在危险环境中,完成复杂的操作任务,应用前景广阔。
- 详细介绍:
- 本发明是一种新型的外骨骼式主从机器人遥控操作系统,通用性极强可以在各类极限环境下进行作业,例如核能,海洋,空间,防灾和排雷等。目前国内外现有的搜救机器人,排雷机器人和太空机器人等应用于极限环境作业的机器人多存在通用性差和操作复杂等问题。增加机器人的自由度,是解决通用性问题的有效途径,但是仅仅采用现有的摇杆和按键的控制方式已无法满足多自由度机器人的操控要求。因此,开发一种可以实时跟随人体肢体运动的多自由度仿人机器人系统,将是解决以上两个问题的最佳选择。外骨骼式主从遥控仿人机器人系统,利用一套束缚在身体上的连杆式外骨骼动作捕捉衣,可以使穿戴者的上肢动作在多自由度机器人身上实时再现出来。此种控制方式具有同步性强,操作者更接近于直接作业形态和操控简便等优点,是一种可行的解决当前问题的有效方案。本发明包括主控单元(master)和从控单元(slave)两个部分。操控者需穿戴外骨骼动作捕捉衣,即主控单元,实现实时采集人体上肢16个关节运动信息的功能。履带式仿人机器人,即从控单元,上身为类人形,具有16自由度,下身为履带式底盘,实现实时跟随主控单元运动的功能。主控单元与从控单元通过无线WIFI技术相互通信。 用户穿戴外骨骼动作捕捉衣后,采集人体动作信息,并传递给机器人。机器人,接受信息后,执行还原人体动作操作,并将动作通过视觉系统进行反馈。操作者得到反馈信息后,进行相应的动作修正操作。 经过实验测试,外骨骼式主从遥控仿人机器人系统可以成功地跟随人体肢体运动,延迟时间在300ms以内。同时该系统的仿人机器人和操作者之间的运动动作相似度较高,各个关节一一对应。在舞刀、传递物品和拆弹等实际操作实验中,系统展现出了较高的精准度和灵活性。机器人电机的最小分度为0.5度,单个机械臂具有7个自由度,可以基本胜任部分超精细工作,具有一定的应用前景。
- 获奖情况:
- 2009年,校第十届星火基金重点项目“人机协同无线遥控机械手”,获得优秀项目称号。 2010年,第十一届国家大学生创新性实验计划项目“人机协同仿人机器人的研究”,获得优秀项目称号。2011年,第六届首都挑战杯机械类一等奖